Kun Huang
About
Contact
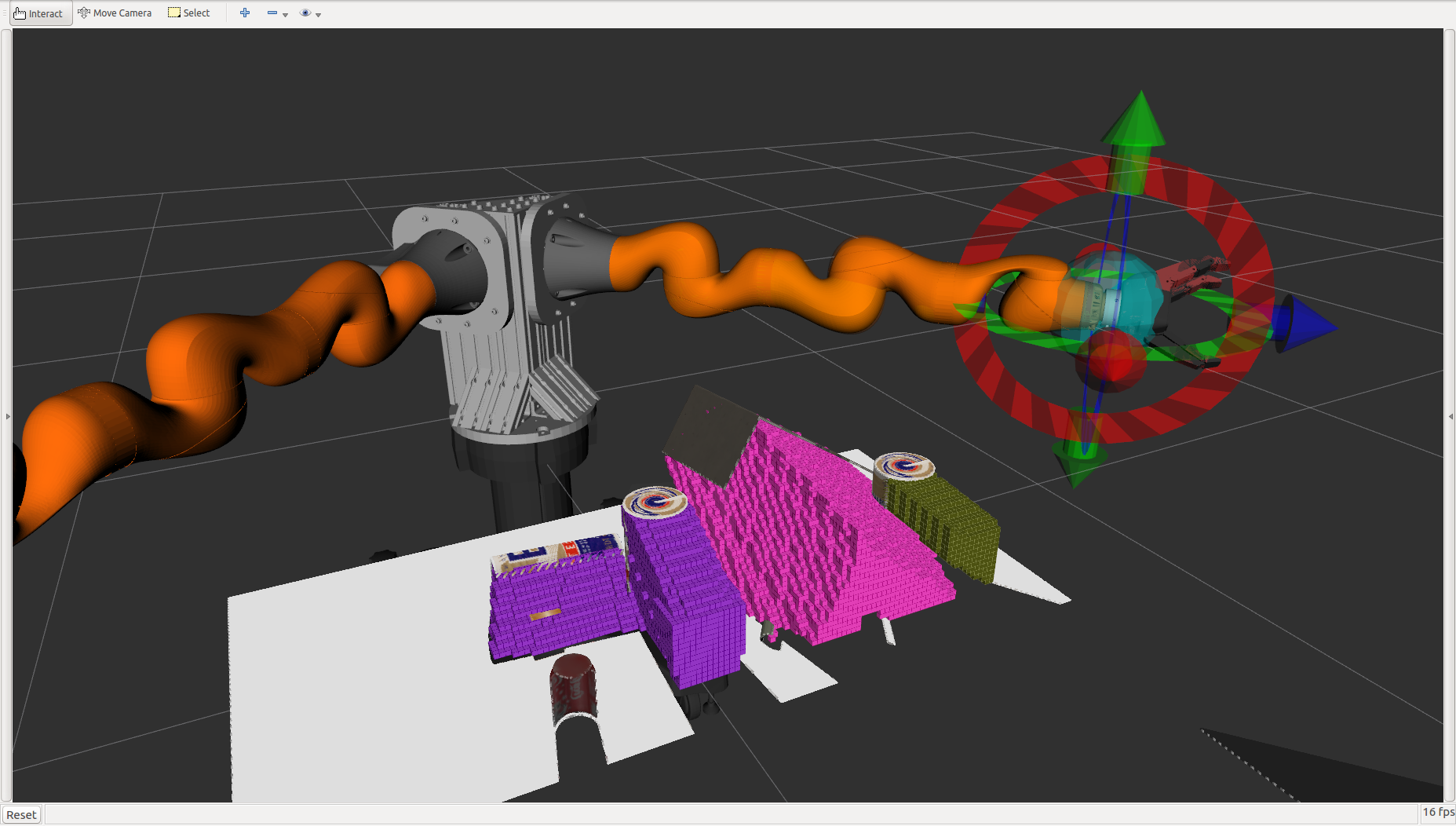
Voxel-space Probabilistic Scene Understanding
Framework
Here is the paper for the whole framework:
Paper